
Аrduino для начинающих
В этой статье я решал собрать полное пошаговое руководство для начинающих Arduino. Мы разберем что такое ардуино, что нужно для начала изучения, где скачать и как установить и настроить среду программирования, как устроен и как пользоваться языком программирования и многое другое, что необходимо для создания полноценных сложных устройств на базе семейства этих микроконтроллеров.
Тут я постараюсь дать сжатый минимум для того, что бы вы понимали принципы работы с Arduino. Для более полного погружения в мир программируемых микроконтроллеров обратите внимание на другие разделы и статьи этого сайта. Я буду оставлять ссылки на другие материалы этого сайта для более подробного изучения некоторых аспектов.
Что такое Arduino и для чего оно нужно?
Arduino — это электронный конструктор, который позволяет любому человеку создавать разнообразные электро-механические устройства. Ардуино состоит из программной и аппаратной части. Программная часть включает в себя среду разработки (программа для написания и отладки прошивок), множество готовых и удобных библиотек, упрощенный язык программирования. Аппаратная часть включает в себя большую линейку микроконтроллеров и готовых модулей для них. Благодаря этому, работать с Arduino очень просто!
С помощью ардуино можно обучаться программированию, электротехнике и механике. Но это не просто обучающий конструктор. На его основе вы сможете сделать действительно полезные устройства.
Начиная с простых мигалок, метеостанций, систем автоматизации и заканчивая системой умного дома, ЧПУ станками и беспилотными летательными аппаратами. Возможности не ограничиваются даже вашей фантазией, потому что есть огромное количество инструкций и идей для реализации.
Стартовый набор Arduino
Для того что бы начать изучать Arduino необходимо обзавестись самой платой микроконтроллера и дополнительными деталями. Лучше всего приобрести стартовый набор Ардуино, но можно и самостоятельно подобрать все необходимое. Я советую выбрать набор, потому что это проще и зачастую дешевле. Вот ссылки на лучшие наборы и на отдельные детали, которые обязательно пригодятся вам для изучения:
| Базовый набор ардуино для начинающих: | Купить |
| Большой набор для обучения и первых проектов: | Купить |
| Набор дополнительных датчиков и модулей: | Купить |
| Ардуино Уно самая базовая и удобная модель из линейки: | Купить |
| Беспаечная макетная плата для удобного обучения и прототипирования: | Купить |
| Набор проводов с удобными коннекторами: | Купить |
| Комплект светодиодов: | Купить |
| Комплект резисторов: | Купить |
| Кнопки: | Купить |
| Потенциометры: | Купить |
Среда разработки Arduino IDE
Для написания, отладки и загрузки прошивок необходимо скачать и установить Arduino IDE. Это очень простая и удобная программа. На моем сайте я уже описывал процесс загрузки, установки и настройки среды разработки. Поэтому здесь я просто оставлю ссылки на последнюю версию программы и на статью с подробной инструкцией.
| Версия | Windows | Mac OS X | Linux | |||||||||
| 1.8.2 |
| Макетная плата на 800 точек с 2 шинами питания, платой подачи питания и проводами: | Купить |
| Большая макетная плата на 1600 точек с 4 шинами питания: | Купить |
| Макетная плата на 800 точек с 2 шинами питания: | Купить |
| Макетная плата на 400 точек с 2 шинами питания: | Купить |
| Макетная плата на 170 точек: | Купить |
| Соединительные провода 120 штук: | Купить |
Первый проект на Arduino
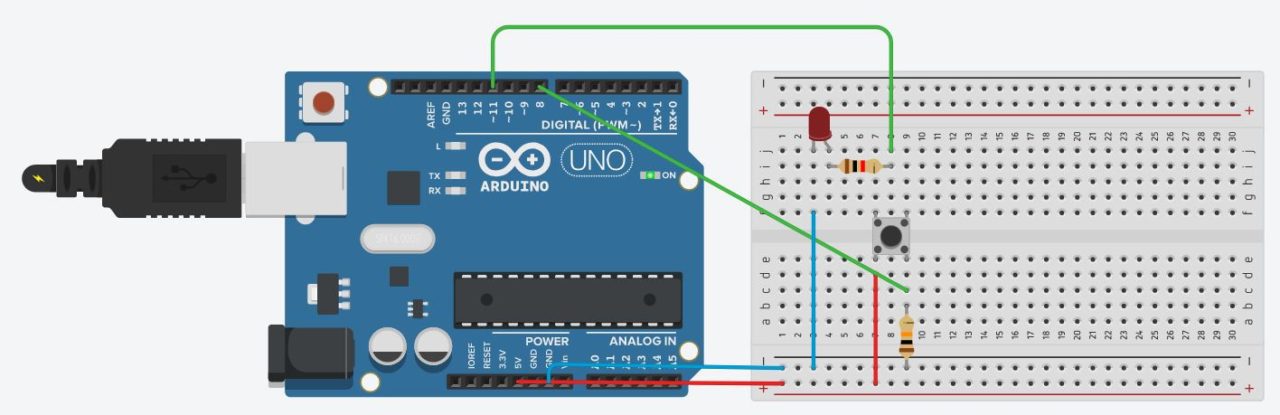
Давайте соберем первое устройство на базе Ардуино. Мы просто подключим тактовую кнопку и светодиод к ардуинке. Схема проекта выглядит так:
 Управление яркостью светодиода
Управление яркостью светодиода
Обратите внимание на дополнительные резисторы в схеме. Один из них ограничивает ток для светодиода, а второй притягивает контакт кнопки к земле. Как это работает и зачем это нужно я объяснял в этом уроке.
Для того что бы все работало, нам надо написать скетч. Давайте сделаем так, что бы светодиод загорался после нажатия на кнопку, а после следующего нажатия гас. Вот наш первый скетч:
В этом скетче я создал дополнительную функцию debounse для подавления дребезга контактов. О дребезге контактов есть целый урок на моем сайте. Обязательно ознакомьтесь с этим материалом.
ШИМ Arduino
Широтно-импульсная модуляция (ШИМ) — это процесс управления напряжением за счет скважности сигнала. То есть используя ШИМ мы можем плавно управлять нагрузкой. Например можно плавно изменять яркость светодиода, но это изменение яркости получается не за счет уменьшения напряжения, а за счет увеличения интервалов низкого сигнала. Принцип действия ШИМ показан на этой схеме:
Когда мы подаем ШИМ на светодиод, то он начинает быстро зажигаться и гаснуть. Человеческий глаз не способен увидеть это, так как частота слишком высока. Но при съемке на видео вы скорее всего увидите моменты когда светодиод не горит. Это случится при условии что частота кадров камеры не будет кратна частоте ШИМ.
В Arduino есть встроенный широтно-импульсный модулятор. Использовать ШИМ можно только на тех пинах, которые поддерживаются микроконтроллером. Например Arduino Uno и Nano имеют по 6 ШИМ выводов: это пины D3, D5, D6, D9, D10 и D11. В других платах пины могут отличаться. Вы можете найти описание интересующей вас платы в этом разделе.
Для использования ШИМ в Arduino есть функция analogWrite(). Она принимает в качестве аргументов номер пина и значение ШИМ от 0 до 255. 0 — это 0% заполнения высоким сигналом, а 255 это 100%. Давайте для примера напишем простой скетч. Сделаем так, что бы светодиод плавно загорался, ждал одну секунду и так же плавно угасал и так до бесконечности. Вот пример использования этой функции:
Аналоговые входы Arduino
Как мы уже знаем, цифровые пины могут быть как входом так и выходом и принимать/отдавать только 2 значения: HIGH и LOW. Аналоговые пины могут только принимать сигнал. И в отличии от цифровых входов аналоговые измеряют напряжение поступающего сигнала. В большинстве плат ардуино стоит 10 битный аналогово-цифровой преобразователь. Это значит что 0 считывается как 0 а 5 В считываются как значение 1023. То есть аналоговые входы измеряют, подаваемое на них напряжение, с точностью до 0,005 вольт. Благодаря этому мы можем подключать разнообразные датчики и резисторы (терморезисторы, фоторезисторы) и считывать аналоговый сигнал с них.
Для этих целей в Ардуино есть функция analogRead(). Для примера подключим фоторезистор к ардуино и напишем простейший скетч, в котором мы будем считывать показания и отправлять их в монитор порта. Вот так выглядит наше устройство:
 Подключение фоторезистора к Ардуино
Подключение фоторезистора к Ардуино
В схеме присутствует стягивающий резистор на 10 КОм. Он нужен для того что бы избежать наводок и помех. Теперь посмотрим на скетч:
Вот так из двух простейших элементов и четырех строк кода мы сделали датчик освещенности. На базе этого устройства мы можем сделать умный светильник или ночник. Очень простое и полезное устройство.
Вот мы и рассмотрели основы работы с Arduino. Теперь вы можете сделать простейшие проекты. Что бы продолжить обучение и освоить все тонкости, я советую прочитать книги по ардуино и пройти бесплатный обучающий курс. После этого вы сможете делать самые сложные проекты, которые только сможете придумать.
15 комментариев
Добрый день, господа!
Очень интересный сайт. Много полезной информации и подача материала спокойная.
Мне нравиться.
Вопрос у меня. Чую попал на грамотных спецов.
Приобрел я на Али китайскую чудо технику — лазерный гравировщик-выжигатель (2 Ватт.).
Плата управления Arduino Nano, драйвера на двигатели на красных платках.
Как водится описание слабое, информация. да все по-китайски. Начал разбираться.
Собрал, заработала машина, задымила. Поправил конфигурацию, на одной оси сделал инверсию.
Самое отвратительное — это ПО. Только зайчиков выжигать. Решил сменить.
Залил GRBL v1.1, программу взял LaserGRBL (версия из последних).
Программа увидела девайс, подключилась на СОМ, ожила, тут бы обрадоваться, да нет.
G-код готовится правильно, но команды включения М3 и выключения М5 лазера, которые прописаны в коде, не выполняются.
Лазер включается при включении девайса, и находится включенным все время, даже в остановленном состоянии (G-код еще не запущен, передвижения нет). При быстром передвижении лазера по рисунку он не выключается и все время жгет, рисуя за собой прожженную черту.
Подскажите, пожалуйста, как заставить лазер отключаться согласно G-коду? Как заставить девайс выполнять команды G-кода М3 и М5? Пробовал в конфигурации ставить и $32=1, и $32=0 — никак не реагирует. Жгет без остановки. Перепрошивал v1.1 — бесполезно.
Мне уже 65 отроду. Некогда досконально изучать Arduino. Говорят, что не поступают команды на лазер.
Да тут и ежику понятно. Как это можно исправить? В настройках галочку с ШИМ снял.
Подскажите, пожалуйста.
С уважением Владимир
дело в том, что легче написать новую прошивку, чем разбираться в прошивке, а для этого надо понимать, как работает ваше устройство! т.е. надо работать вместе программист, и пользователь!
иначе никак!
илли 2 способ- изучите программирование, и пишите сами что вам надо!
поверьте- это не так сложно!
Благодарен автору за полезное дело.
Помогать учиться, это самое лучшее занятие для человека.
Источник статьи: http://all-arduino.ru/arduino-dlya-nachinayushhih/
Как написать скетч для ардуино нано
Вот и закончился базовый курс уроков программирования Arduino. Мы с вами изучили самые базовые понятия, вспомнили (или изучили) часть школьной программы по информатике, изучили большую часть синтаксиса и инструментов языка C++, и вроде бы весь набор Ардуино-функций, который предлагает нам платформа. Подчеркну – мы изучили C++ и функции Ардуино, потому что никакого “языка Arduino” нет, это ложное понятие. Arduino программируется на C или ассемблере, а платформа предоставляет нам всего лишь несколько десятков удобных функций для работы с микроконтроллером, именно функций, а не язык. Теперь перед нами чистый лист блокнота Arduino IDE и желание творить и программировать, давайте попробуем!
Структура программы
Прежде, чем переходить к реальным задачам, нужно поговорить о некоторых фундаментальных вещах. Микроконтроллер, как мы обсуждали в самом начале пути, это комплексное устройство, состоящее из вычислительного ядра, постоянной и оперативной памяти и различных периферийных устройств (таймеры/счётчики, АЦП и проч.). Обработкой нашего с вами кода занимается именно ядро микроконтроллера, оно раздаёт команды остальным “железкам”, которые в дальнейшем могут работать самостоятельно. Ядро выполняет различные команды, подгоняемое тактовым генератором: на большинстве плат Arduino стоит генератор с частотой 16 МГц. Каждый толчок тактового генератора заставляет вычислительное ядро выполнить следующую команду, таким образом Ардуино выполняет 16 миллионов операций в секунду. Много ли это? Для большинства задач более чем достаточно, главное использовать эту скорость с умом.
Зачем я об этом рассказываю: микроконтроллер может выполнить только одну задачу в один момент времени, так как у него только одно вычислительное ядро, поэтому реальной “многозадачности” нет и быть не может, но за счёт большой скорости выполнения ядро может выполнять задачи по очереди, и для человека это будет казаться многозадачностью, ведь что для нас “раз Миссисипи“, для микроконтроллера – 16 миллионов действий! Есть всего два варианта организации кода:
- Основной парадигмой работы с микроконтроллером является так называемый суперцикл, то есть главный цикл программы, который выполняется сверху вниз (если смотреть на код) и начинает с самого начала, когда доходит до конца, и так далее. В Arduino IDE нашим суперциклом является loop() . В главном цикле мы можем опрашивать датчики, управлять внешними устройствами, выводить данные на дисплеи, производить вычисления и всё такое, но в любом случае эти действия будут происходить друг за другом, последовательно. В этом и заключается основной механизм параллельности задач: на самом деле все они выполняются последовательно друг за другом, но в то же время достаточно быстро для того, чтобы казаться “параллельными”.
- Помимо основного цикла у нас есть прерывания, которые позволяют реализовать некую “поточность” выполнения задач, особенно в тех ситуациях, когда важна скорость работы. Прерывание позволяет остановить выполнение основного цикла в любом его месте, отвлечься на выполнение некоторого блока кода, и после успешного его завершения вернуться к основному циклу и продолжить работу. Некоторые задачи можно решить только на прерываниях, не написав ни одной строчки в цикл loop() ! Мы с вами изучали аппаратные прерывания, позволяющие прерваться при замыкании контактов. Такие прерывания являются внешними, то есть их провоцируют внешние факторы (человек нажал на кнопку, сработал датчик, и т.д.). Также у микроконтроллера есть внутренние прерывания, которые вызываются периферией микроконтроллера, и этих прерываний может быть не один десяток! Одним из таких прерываний является прерывание таймера: по настроенному периоду программа будет прерываться и выполнять указанный код. Об этом мы поговорим ниже, а также на сайте есть отдельный урок по работе с прерываниями таймера. Такой подход хорош для задач, которые должны выполняться часто и с большой частотой, для всего остального можно настроить один таймер на счёт времени и работать с этим временем.
- По умолчанию Arduino IDE настраивает один из таймеров (нулевой) на счёт реального времени, благодаря этому у нас работают такие функции как millis() и micros() . Именно эти функции являются готовым инструментом для тайм-менеджмента нашего кода и позволяют создавать работу по расписанию. Самый важный и критический момент: задачи не должны тормозить выполнение программы на бОльший период, чем период самой короткой задачи, иначе все задачи будут выполняться с периодом самой долгой! Именно поэтому нужно отказываться от задержек и ожиданий: задержку всегда можно заменить на проверку таймера при следующих итерациях цикла, и то же самое с ожиданием чего-то, например ответа датчика. Задачи должны быть максимально асинхронными и не блокировать код, к сожалению не во всех библиотеках есть неблокирующие аналоги функций. Даже родной блокирующий analogRead() можно сделать неблокирующим, но Arduino решили не усложнять жизнь новичкам.
“Многозадачность” с millis()
Большинство примеров к различным модулям/датчикам используют задержку delay() в качестве “торможения” программы, например для вывода данных с датчика в последовательный порт. Именно такие примеры портят восприятие новичка, и он тоже начинает использовать задержки. А на задержках далеко не уедешь!
Давайте вспомним конструкцию таймера на millis() из урока о функциях времени: у нас есть переменная, которая хранит время прошлого “срабатывания” таймера. Мы вычитаем это время из текущего времени, эта разница постоянно увеличивается, и по условию мы можем поймать тот момент, когда пройдёт нужное нам время. Будем учиться избавляться от delay() ! Начнём с простого: классический blink:
Программа полностью останавливается на команде delay() , ждёт указанное время, а затем продолжает выполнение. Чем это плохо? (А вы ещё спрашиваете?) Во время этой остановки мы ничего не можем делать в цикле loop() , например не сможем опрашивать датчик 10 раз в секунду: задержка не позволит коду пойти дальше. Можно использовать прерывания (например – таймера), но о них мы поговорим в продвинутых уроках. Сейчас давайте избавимся от задержки в самом простом скетче.
Первым делом внесём такую оптимизацию: сократим код вдвое и избавимся от одной задержки, используя флаг:
Хитрый ход, запомните его! Такой алгоритм позволяет переключать состояние при каждом вызове. Сейчас наш код всё ещё заторможен задержкой в 1 секунду, давайте от неё избавимся:
Что здесь происходит: цикл loop() выполняется несколько сотен тысяч раз в секунду, как ему и положено, потому что мы убрали задержку. Каждую свою итерацию мы проверяем, не настало ли время переключить светодиод, не прошла ли секунда? При помощи этой конструкции и создаётся нужная многозадачность, которой хватит для 99% всех мыслимых проектов, ведь таких “таймеров” можно создать очень много!
Данный код всё ещё мигает светодиодом раз в секунду, но помимо этого он с разными промежутками времени отправляет сообщения в последовательный порт. Если открыть его, можно увидеть следующий текст:
Это означает, что у нас спокойно работают 4 таймера с разным периодом срабатывания, работают “параллельно”, обеспечивая нам многозадачность: мы можем выводить данные на дисплей раз в секунду, и заодно опрашивать датчик 10 раз в секунду и усреднять его показания. Хороший пример для первого проекта!
Обязательно вернитесь к уроку о функциях времени, там мы разобрали несколько конструкций на таймере аптайма!
Параллельность с прерываниями таймера
Для критичных по времени задач можно использовать выполнение по прерыванию таймера. Какие это могут быть задачи:
- Динамическая индикация;
- Генерация определённого сигнала/протокола связи;
- Программный ШИМ;
- “Тактирование” шаговых моторов;
- Любой другой пример выполнения через строго указанное время или просто периодическое выполнение по строгому периоду (несколько микросекунд). Так как это прерывание – задача будет обрабатываться в приоритете к остальному коду в суперцикле.
Настройка таймера на нужную частоту и режим работы – непосильная для новичка задача, хоть и решается в 2-3 строчки кода, поэтому предлагаю использовать библиотеки. Для настройки прерываний по таймеру 1 и 2 есть библиотеки TimerOne и TimerTwo. Мы сделали свою библиотеку, GyverTimers, в которой есть также таймер 0 (для программирования без использования Arduino.h), а также все таймеры на Arduino MEGA, а их там целых 6 штук. Ознакомиться с документацией и примерами можно на странице библиотеки.
Сейчас рассмотрим простой пример, в котором “параллельно” выполняющемуся Blink будут отправляться данные в порт. Пример оторван от реальности, так делать нельзя, но он важен для понимания самой сути: код в прерывании выполнится в любом случае, ему безразличны задержки и мёртвые циклы в основном коде.
Прерывания по таймеру являются очень мощным инструментом, но таймеров у нас не так много и нужно использовать их только в случае реальной необходимости. 99% задач можно решить без прерываний таймера, написав оптимальный основной цикл и грамотно применяя millis() . Посмотрите мой проект контроллера теплицы: там не используются прерывания таймера, но система постоянно выполняет большое количество опросов датчиков, вычислений, управляет железками, выводит на дисплей и контролируется энкодером.
Переключение задач
Важнейшим инструментом по организации логики работы программы является так называемый конечный автомат (англ. State Machine) – значение, которое имеет заранее известный набор состояний. Звучит сложно, но на самом деле речь идёт об операторе swith и переменной, которая переключается кнопкой или по таймеру. Например:
Таким образом организуется выбор и выполнение выбранных участков кода. Переключение переменной mode тоже должно быть сделано не просто так, как в примере выше, тут есть варианты:
- Ограничить диапазон переменной mode по минимальному коду задачи (обычно 0) и максимальному (количество задач минус 1).
- Сделать переключение с последней задачи на первую и наоборот, т.е. “закольцевать” изменение.
Ограничить диапазон при увеличении можно несколькими способами. Способы абсолютно одинаковые по своей сути, но записать можно по разному:
Аналогично при уменьшении:
Переключение с первой на последнюю и обратно делается точно так же:
Рассмотрим несколько готовых примеров на базе библиотеки GyverButton:
Источник статьи: http://alexgyver.ru/lessons/how-to-sketch/